Willkommen bei
SolarChaser
Unser Projekt
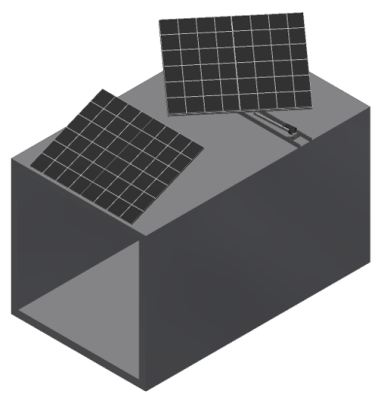
Unser Projekt besteht aus einem einachsigen Solartracker, der mit dem Verlauf der Sonne wandert. Das besondere an unserem Projekt ist, dass unser System die Energie, die es verbraucht selbst erzeugt und speichert.
Außerdem wird unser Inselsystem eine Garage mit Strom versorgen, da dort kein Stromanschluss vorhanden ist. Dabei ist es unser Ziel Licht, Steckdose, Garagentormotor und im besten Fall noch andere Verbraucher mit Strom zu versorgen. Unsere Lösung soll somit das Maximale aus der Solaranlage herausholen.
Ein weiteres Ziel unseres Projektes ist es eine KI zu integrieren. Diese wird in einer Kamera-Schmutzerkennung angewendet. Wobei die KI mittels Bilderkennung den Verschmutzungsgrad erkennen soll und eine Meldung ausgibt wenn die Verschmutzung der Panele zu hoch ist.
Zum Vergleich werden wir zwei statische und zwei schwenkbare Module auf dem dach montieren und die Stromerzeugung miteinander vergleichen.


Projektfortschritt
Hier werden wir in Zukunft unseren Fortschritt Dokumentieren und mit euch teilen
Gegebenheiten
Unsere Konstruktion werden wir auf einer Standard-Fertiggarage aufbauen.
Der Bereich in dem die Sonne auf das Dach trifft wird durch zwei Bäume begrenzt, wie in den Bildern zu sehen.



Umsetzung der Mechanik
Das Grundgestell wird aus ITEM-Profilen gefertigt, da diese kostengünstig und flexibel sind.
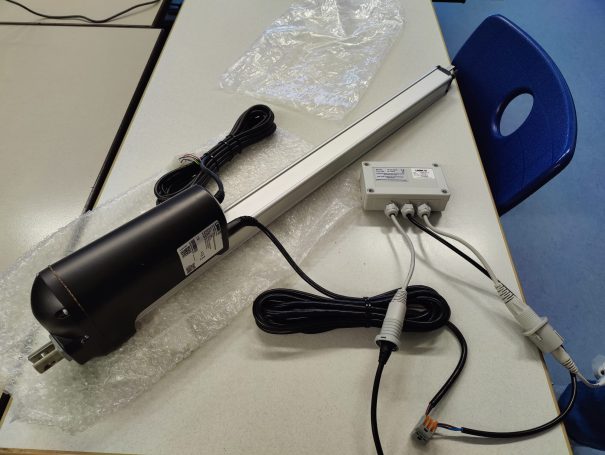
Durch die Begerenzung haben wir ca. eine Drehung von 130° die realisiert werden muss. Dazu haben wir uns entschieden einen Linearmotor mit exzentrischer Anbindung zu verwenden, wie im folgenden Video zu sehen.
Außerdem verwenden wir ein Drehkranzlager von IGUS.
…….
Kameragehäuse
Für die Kamera der Schmutzerkennung haben wir ein Gehäuse gebraucht, welches die Kamera und den USB-Anschluss vor der Witterung schützt. Dieses haben wir selbst entworfen und mit dem 3D-Drucker gedruckt.



…….
Umsetzung der Elektrik und Steuerung
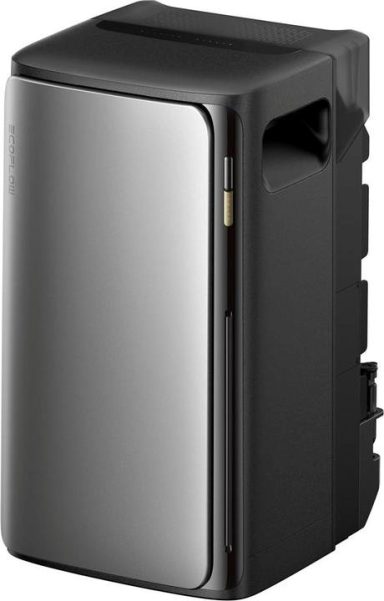
Um unsere Stromversorgung sicher zu stellen verwenden wir einen Akkuspeicher von EcoFlow. Damit werden die Garage, sowie die Steuerung, der Motor und alle anderen Komponenten mit Strom versorgt.
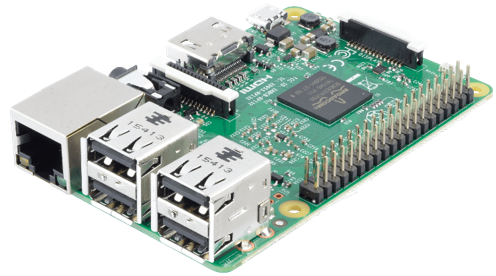
Die Steuerung wird über einen Rasperry Pi laufen, da wir außer der Motorsteuerung auch die Erträge auswerten und eine KI für die Schmutzüberwachung der Panele integrieren wollen.
Um unsere Vorhaben umzusetzen verwenden wir folgende elektrische Bauteile:
-LINAK Linearmotor mit 24V DC und 13A
-Raspberry PI 5 mit 8GB RAM
-H-Brücke für Motorsteuerung
-Reed Endlagenschalter
-EcoFlow Akkuspeicher
-Wago Netzteil 24V
und viele mehr.

Außerdem musste wir für die elektrische Sicherheit eine neue Erdung setzen, bei der es zu einigen Komplikationen kam.
Für das setzen der Erdung haben wir Staberder verwendet. Beim setzen der ersten Erdung kamen wir auf einen Wert von ca 64Ω was deutlich zu hoch war. Weswegen wir noch einen zweiten gesetzt haben um auf einen Wert kleiner 30Ω zu kommen.


Unsere Sponsoren
Ein riesiges Dankeschön an unsere unsere Sponsoren und deren Unterstützung für unsere Projektarbeit







…….…….
Hier nochmal Bilder zu den Bauteilen die uns freundlicherweise zur Verfügung gestellt wurden